
By Alex Lee, Francesca-Zhoufan Li, and Ernesto Rojas
Nestled within Cory Hall at the University of California, Berkeley is a small robotics lab which, to most people, could only be described as cluttered. But to an engineer, who will recognize the familiar sights of tools, cables, and equipment, this is nothing less than home. It is a well-organized chaos, as complex and fantastical as the natural creatures it draws inspiration from.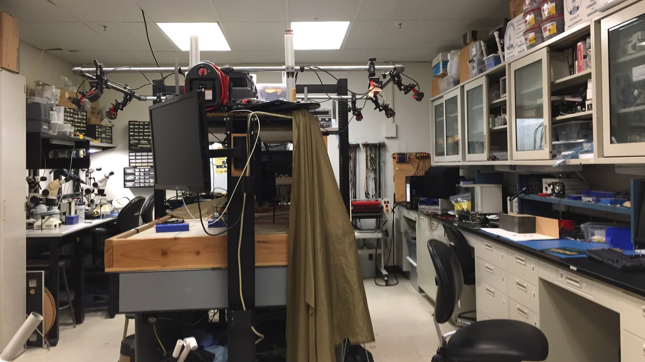
“Biomimetic means that we are inspired by what nature can do,” Fearing explained. “We know there are a lot of animals that are very small scale, which are extremely capable, so if we take advantage of what we learn from animals and put that in robots, we have an existence proof of what can be done.”Fearing’s lab studies the abilities of little creatures like geckos, cockroaches, and small mammals, focusing on how their forms of locomotion, or movement, actually work. After researchers understand those abilities, such as how cockroaches can roll back over after being flipped on their back, they construct small robots, or millirobots, that closely mimic them. The goal of this biomimetic analysis is to introduce new capabilities, already present in nature, to robotics. After all, many of the problems robots face today have been addressed by natural evolution already. In this sense, evolutionary biology acts as the stepping stone for robotic development in the Millisystems lab. We found one of their projects quite remarkable.
Meet the Galago-Like Jumping Robot: SALTO
In the Millisystems Lab, Graduate Student Researcher Justin Yim hands us a robot scarcely bigger than our palms. This was SALTO, or Saltatorial Agile Locomotion on Terrain Obstacles, designed to jump like the Galago senegalensisor Senegal Bushbaby. The Galago is the size of a squirrel and originates from Africa. It’s an agile leaper. For animals this small, saltatorial locomotion, or jumping, is an invaluable ability. As Yim explained, “big obstacles are hard for large creatures. They’re even harder when you’re smaller. And so, we wanted to see if jumping can get these robots to move in places that are really, really hard.”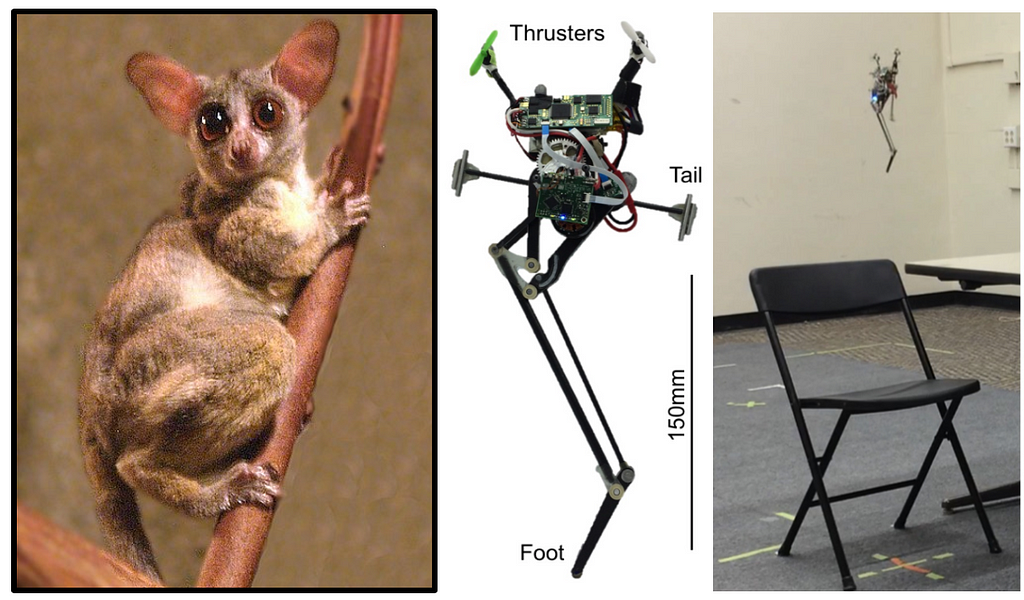
Breathing Life into SALTO
The first step in SALTO’s journey was the development of a mechanism that mimicked the powerful leg of the Galago. This was accomplished through the use of a configuration of linkages called an 8-bar linkage. It allows for complicated but controllable position changes. This works similarly to locked pliers, which transition from an “open” to a “locked” state. The 8-bar linkage lets SALTO exhibit variable mechanical advantage; in other words, the leg moves smoothly from a stiff, high tension state, to a loose, low tension state. The purpose of this mechanism is to simulate the Galago’s power amplification, a method of storing large amounts of energy and then releasing it in large movements, like jumping. In a Galago, energy is provided by muscles and stored and released by tendons. In SALTO, motors provide power and a spring or elastic band provides storage. In its crouching state, the motor must work hard and pours energy into winding the spring. As the leg extends, the change in leg shape allows both the motor and spring to kick off with explosive energy, propelling the robot into the air. This clever combination of systems allows SALTO to make jumps in quick succession, fast enough to leap off not just the floor but walls as well. SALTO is not only capable of jumping high, but also fast — — each subsequent jump occurs in a mere 70 milliseconds — one-fifth of the time you blink your eyes.Choreographing the Jumping of SALTO-1P
The next step in SALTO’s evolution required the development of a controller. Compared to robots, living animals are a fantastically complicated system of nerves and reflexes. And yet, humans take an entire year to learn how to walk. For a robot like SALTO, deaf, blind, and brainless, how can you design it to do the same, and more? They first used a Raibert step controller, based on the work of Marc Raibert, founder of the robotics company Boston Dynamics. It regulated forward running speed, body attitude, and hopping height. This allowed the robot, now called SALTO-1P, to keep its balance while jumping. In fact, it jumped 174 consecutive times in one trial. In the subsequent improvement, they replaced it for one of their own designs, called the deadbeat foot placement hopping controller, which was tailored to a one-legged hopping robot. This new iteration achieved more complicated jumps thanks to increased foot precision and permitted SALTO-1P to leap off dynamic, moving, and disconnected surfaces, not just flat floors. Up to this point, SALTO-1P’s testing had involved recording its movements in real-time using motion capture cameras and movement calculations on a separate computer. It was accurate, but impractical, confining the robot to a laboratory environment. To allow it to hop on its own in the outside world, an orientation velocity estimator, or SHOVE, was designed. Angular rate gyroscopes were used to detect how far and how quickly SALTO-1P turned. By combining measurements in three dimensions, SALTO-1P could estimate how far, and where, it was jumping on its own. However, a major challenge was that angular rate gyroscopes accumulated error over time, and so the second component of SHOVE was estimate correction. Now, SALTO-1P could operate untethered to lab equipment, and account for the errors of its own estimates and correct them in a very short amount of time.

SALTO Showtime & Its Future
Over the past couple of years, the SALTO project has made significant progress in adding capabilities to this little robot. Originally, it could only make a single jump, or two if it was next to a wall. Now, SALTO-1P can autonomously jump repeatedly for hundreds of seconds on imperfect terrain, or even be controlled by a human driver.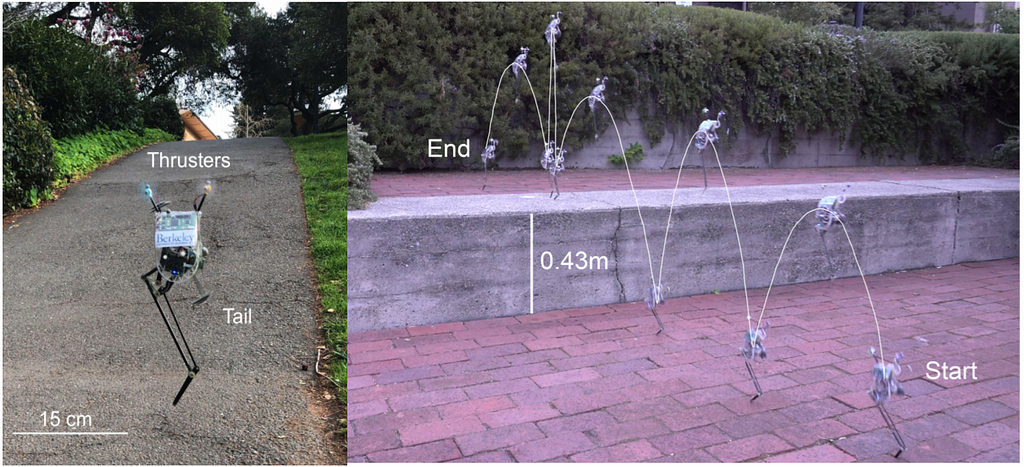
By leaps and bounds: How the biomimetic millisystem lab’s SALTO robot reaches new heights was originally published in Berkeley Master of Engineering on Medium, where people are continuing the conversation by highlighting and responding to this story.