
Edited Ashley Villanueva
Douglas Hutchings, Lead Mechatronics Engineer at Squishy Robotics, received an honorable mention for the 2019 MEng Capstone Industry Mentorship Award at the 2019 Berkeley MEng Capstone Showcase. The award recognizes the Capstone advisor who fosters intellectual independence, provides project support, and furthers professional development.

What is your advising philosophy?
That’s a great question. I don’t have a clear cut, well defined “advising philosophy.” What I try to do is give each MEng student and team clear goals. I then check in with each team and student on a regular (usually weekly) basis, at a minimum. I try to look ahead and remove hard blockers (i.e. problems outside the scope of their work) before the MEng students run into those problems. I also remain accessible for questions at most times, which the MEng students take advantage of. (Our company is located close to the UCB campus and the MEng students usually work at our office.)What was the most memorable moment with your team?
Without a doubt: Tech Crunch. Squishy Robotics had an opportunity to present at Tech Crunch: Robotics and AI on April 19. It was held on campus at Zellerbach Hall, so we asked the MEng students to come and some of their work was highlighted in the presentation. Or maybe the time we all went to KBBQ at the end of the first semester!What’s unique about Berkeley MEng students compared to students from other universities?
MEng students are all smart and are incredibly diverse (probably a function of having so many international students) — there are some out there with unique viewpoints and a great work ethic, who want to dive into a particular subject. Some come in with deep skill sets in one area which they want to improve, others come in with no experience in the area that they want to learn about. It can be quite tricky navigating that balance. We didn’t get it right all the time, but it’s a useful dynamic to know about.What led you to propose an MEng Capstone project?
Proposing an MEng Capstone project was a no-brainier for us. Squishy Robotics grew out of a UC Berkeley research lab, BEST Lab, run by Prof. Alice Agogino. Professor Agogino has long experience with MEng teams, and we are familiar with the kind of student and work effort that we can expect from an MEng team. We needed help, and the MEng program was a natural place to turn to.How did you go about recruiting your team?
Our process was informed by our previous experience with MEng teams. We had a rough idea of the scope of work and number of students that we thought we could then support. We then had a conversation with anyone who showed interest at the MEng tabling session (our project always has a lot of interest). From there, we down selected, based on skill set, diversity, our impressions about the student, and our needs. One thing that I am quite proud of is the academic diversity of our team. Unlike some of our previous teams, we didn’t focus too much on the concentration of the student, but instead on their interests. Our teams this year had a diverse set of concentrations. We had Product Design, Controls, and Simulation Mechanical Students, and a Civil Engineer as well.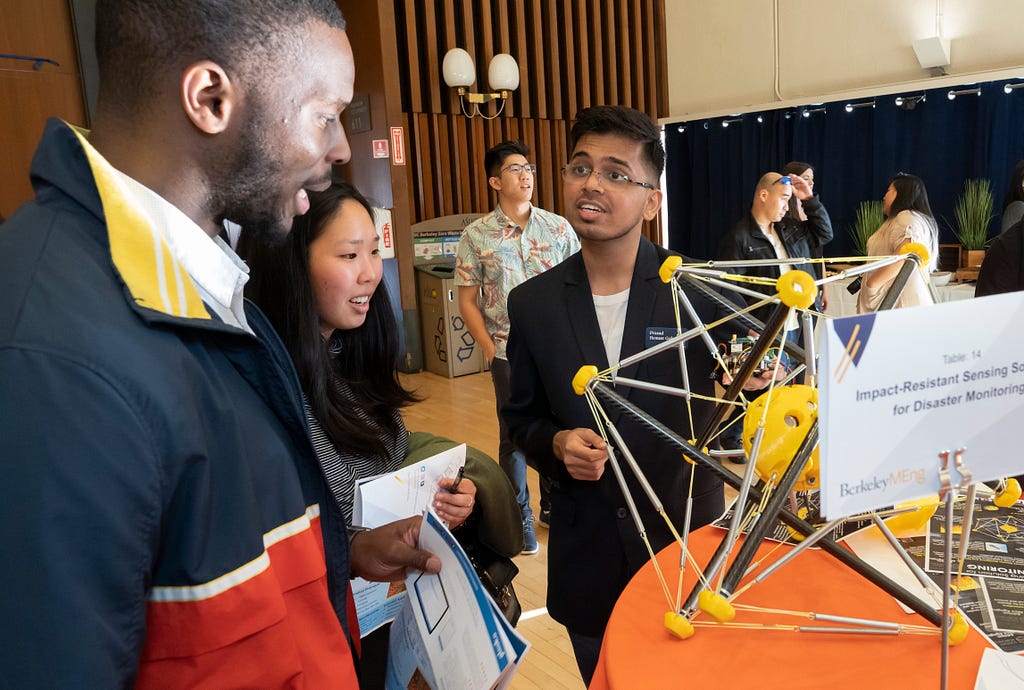
What advice would you give to industry partners who’ll be advising a Capstone team in the future?
You get out what you put in. You really do. I think that we worked quite closely with our MEng students, based on the impressions of our MEng students talking to their classmates. Close contact serves as a good motivator, and can also make sure that the project is well aligned to the company goals. It will take more effort than you originally realize for the MEng students to be onboarded and useful. We also phrased their project as “Build X feature, or Figure out how to do Y.” This was a lot less ‘Researchy’ than some of the other projects that we ran in the past — I think it produced more concrete results, but less novel work.How will your project be different next year? What are you planning on doing different next year?
We haven’t fully thought through this yet, but we do have some hot-takes. One thing we want to change is the ratio of people on our end to MEng students. At the beginning of the year, we had one person (myself) working closely with our eight MEng students. That was a huge handful, and really sucked my time to on board them. It was especially hard since the two MEng teams essentially broke into two subteams each — there were four projects running simultaneously. But during second semester, we had three people on our end working with the MEng students. We were able to subdivide the responsibility on the support end — that worked much better. While I engaged with everyone, there was a first line of defense that was able to work with two of the sub-teams directly — that made a big difference.How did the Capstone team advance this technology? What was their major accomplishment? How can next year’s team continue the work?
It varies. But most of the MEng students’ work made incremental progress on various parts of our product that either have, or soon will be, integrated into our product. It is likely that next year’s MEng students will not work on the exact same problem, but new problems as they arise. We have a long list of thing that we need to do.About Douglas’s Capstone teams:
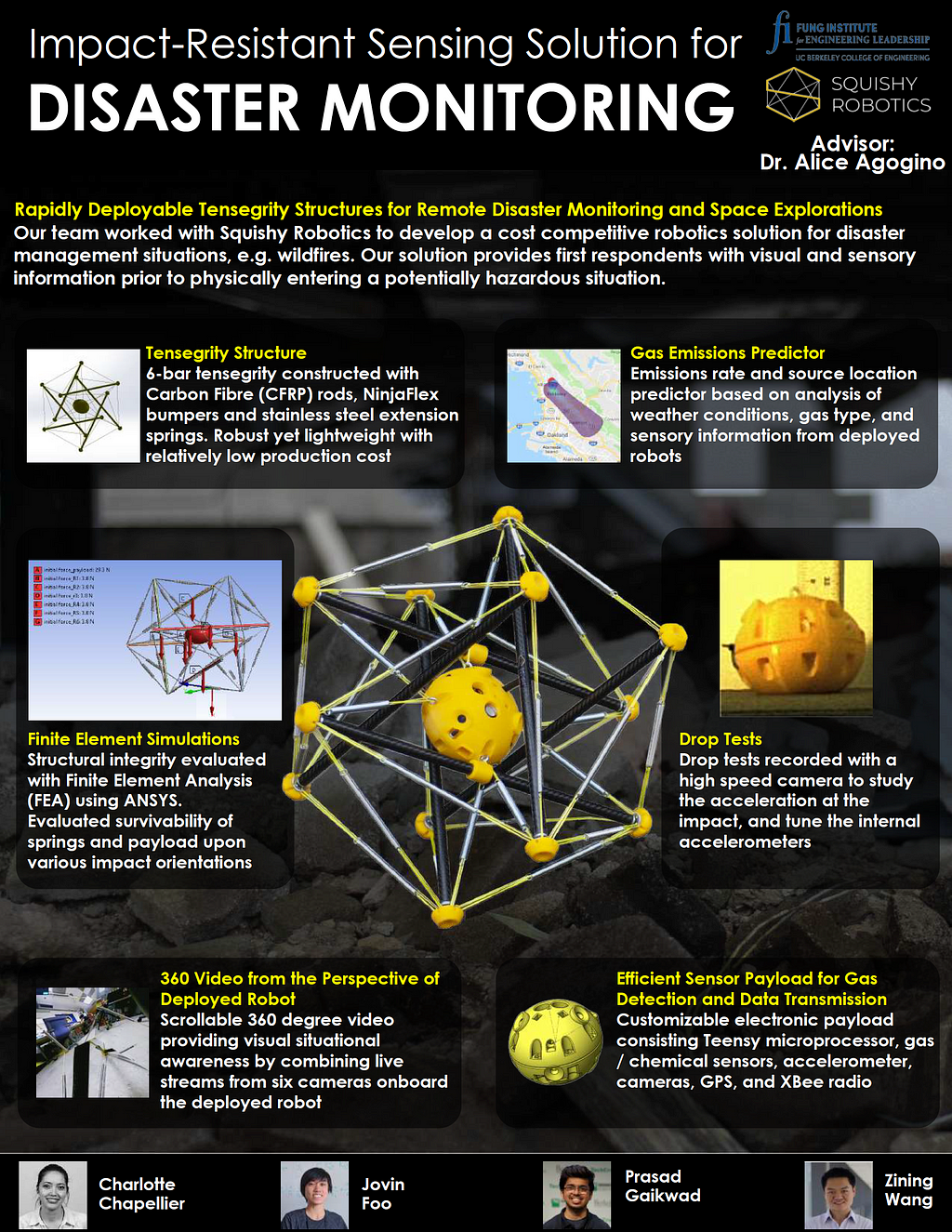
Impact-Resistant Sensing Solution for Disaster Monitoring
Rapidly Deployable Tensegrity Structures for Remote Disaster Monitoring and Space Exploration Team: Charlotte Chapellier [ME], Jovin Foo [ME], Prasad Gaikwad [ME], Zining Wang [CEE] Project Description: Squishy Robotics is developing a cost competitive robotics solution for disaster management. The robots will remotely provide first respondents with situational awareness reducing human exposure to the hazard at hand. Squishy robots are drone deployed in swarms hundreds of meters above the danger area. Their unique tensegrity structure enables them to absorb the shock from the impact of these drops. Our tensegrity structure is made from 6 Carbon Fibre rods held in tension via 24 extension springs. Additionally, 12 springs connect the external skeleton of the robot to a central payload which can carry a variety of electronics such as cameras, chemical sensors, etc. These sensors provide first respondents with visuals and sensory information prior to physically entering a potentially hazardous situation. These electronics are also well-protected in the central payload enclosure, designed and manufactured in-house by our team. A complementary software package including an intuitive user-interface which displays the analyzed sensor data is also developed in-house.
Rapidly Deployable Autonomous Mobile Robots for Disaster Rescue
Squishy robot structures air-dropped to aid emergency personnel and save lives. Team: Mason Friedberg [ME], Josh Peterson [ME], Mrunal Sarvaiya [ME], Tianyi Chen [ME] Project Description: The number of natural disasters affecting humanity has increased over the past 50 years. Climate change has increasingly led to stronger and more frequent disasters. These can be anything from earthquakes, to hurricanes, and also forest fires. Current solutions to monitor these disaster sites, such as drones, satellites, and existing ground units, lack in their current capabilities. This is where we come in. We have created an active tensegrity robot to better serve emergency personnel in exploring and monitoring disaster sites. More specifically, this new system will help inform first responders of hazardous ground conditions and aid in search and rescue operations. Connect with Douglas.Advisor Feature: Douglas Hutchings, Squishy Robotics was originally published in Berkeley Master of Engineering on Medium, where people are continuing the conversation by highlighting and responding to this story.