

Improved path planning is key for developing robots that will safely operate in homes, providing care and assistance. Instead of using traditional random sampling-based path planners, the team adapted an optimization-based path planner which gives predictable and intuitive path.
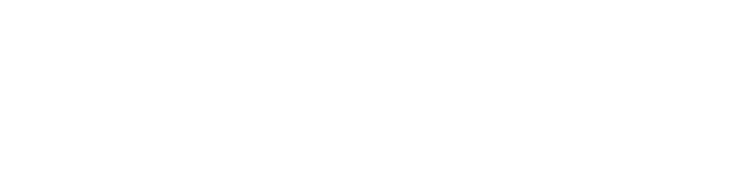
Robotics have been promised as a solution to elderly care and home assistance, but we still don’t see robots immersed and fully integrated into our lives. We believe this shortcoming is due in part to the unpredictable movements of robots caused by poorly planned paths. Instead of using traditional random sampling based path planners, we adapted an optimization based path planner which gives predictable and intuitive path, allowing the robot to move safely around human.
Capstone Team: Stephen Hansen, Tina Chen, Jiachen Wang
Capstone Advisor: Anca Dragan
Integrated Grasping System
We built an integrated grasping system to demonstrate human-aware robot grasping tasks. Our hardware component consists of Kinect sensor for object and obstacle detection and Jaco 7DOF robot arm for executing grasping tasks.
Optimization Based Path Planner
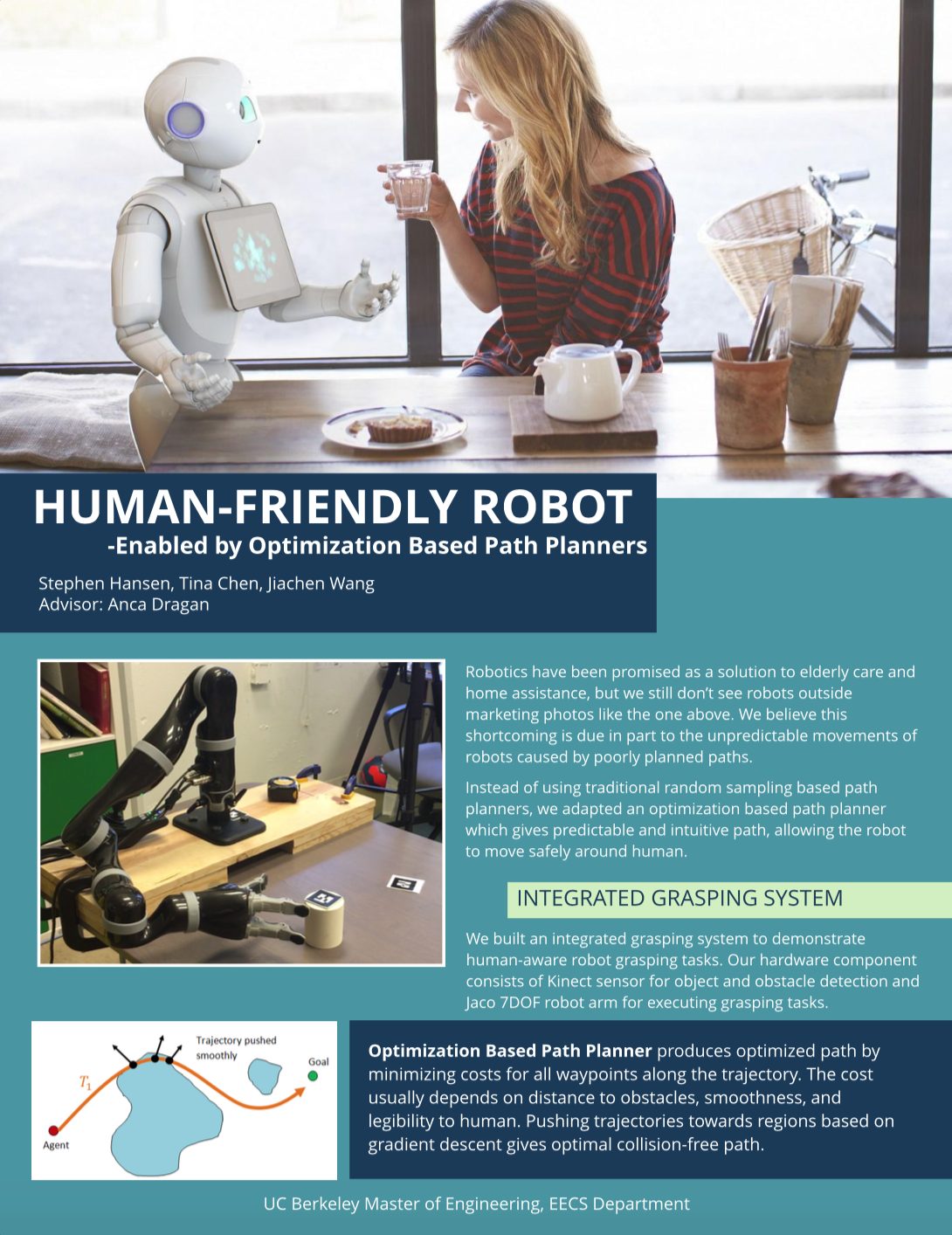
The Optimization Based Path Planner produces optimized path by minimizing costs for all waypoints along the trajectory. The cost usually depends on distance to obstacles, smoothness, and legibility to human. Pushing trajectories towards regions based on gradient descent gives optimal collision-free path.
← View all Capstone Projects