
Team: Jamie Chen (ME), Sonny Li (ME), David Tondreau (ME), Mengyue Wang (ME)
Advisor: Koushil Sreenath (ME)
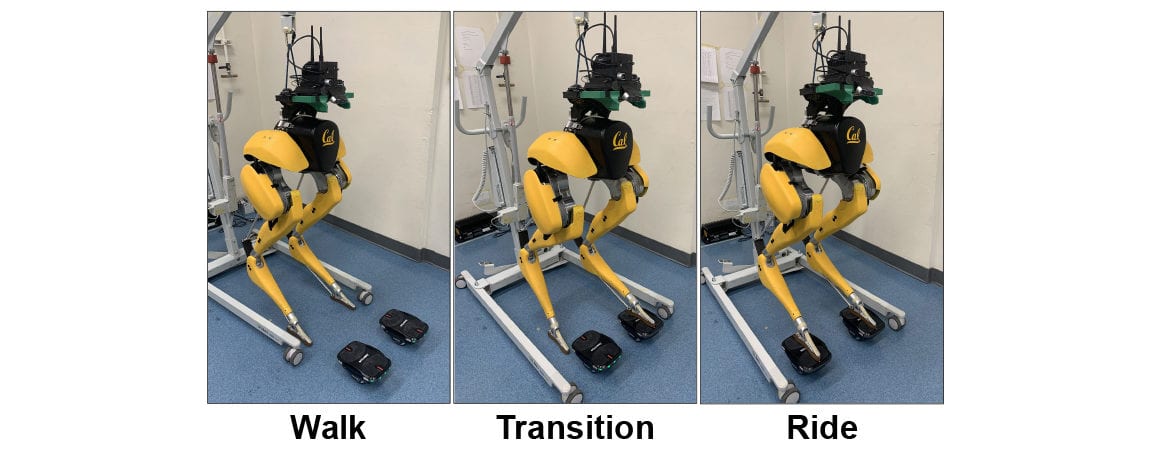
Disaster relief demands both speed and adaptability to complex terrain; however, modern robots, which offer the potential to aid first responders, are currently specialized either for speed (wheeled robots) or for adaptability (legged robots). Our team is working to enable the transition of bipedal robots between legged locomotion and wheeled transportation. Our approach is to develop a full-stack autonomous system with perception to recognize the hovershoe, trajectory optimization for precise foot placement, and a series of inner controllers to realize the trajectory.
Perception:
The perception module must both identify the location where the robot must place its foot and localize the robot in 3D space. We proposed a two-camera system where each camera has a unique orientation to simultaneously achieve the aforementioned tasks while meeting the requirements of the robot’s system infrastructure.
Gait Synthesis:
A library of gaits is computed offline by leveraging C-FROST, a direct-collocation optimization tool created for hybrid systems. The optimization problem employs the IPOPT numerical solver with an objective function to minimize control effort and pelvis movement under constraints to obtain gaits.
Control:
To realize the optimal gaits, inverse kinematics transformed the desired virtual leg coordinates to joint angles. To enforce the joint angles, PD control was used to calculate the required motor torques. Last, a finite state machine switched between the walking, transition, and riding controllers.
We implemented a standalone perception module, integrated gait optimization with a low-level controller, and achieved discrete walking in simulation. Our contribution established the foundation of a multi-year project for Cassie Cal to aid first responders.
Project Brief

Recent News:
Q&A with the capstone winners of 2020 Fung Institute Mission Award

← View all Capstone Projects

